A personal project for fun.
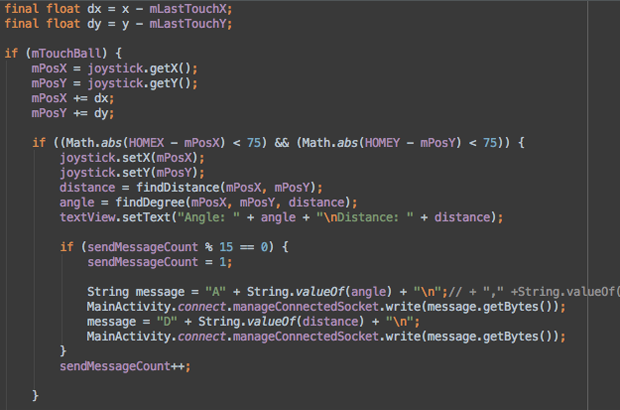
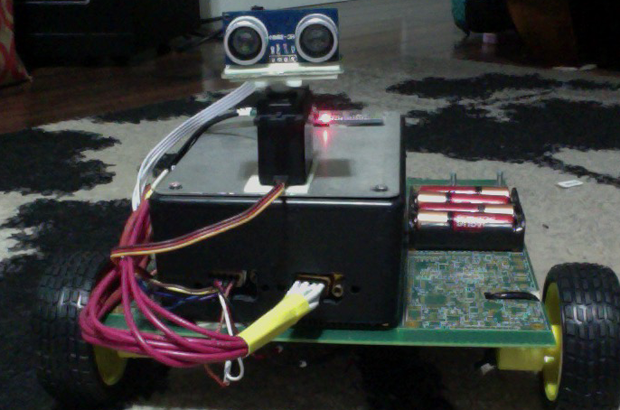
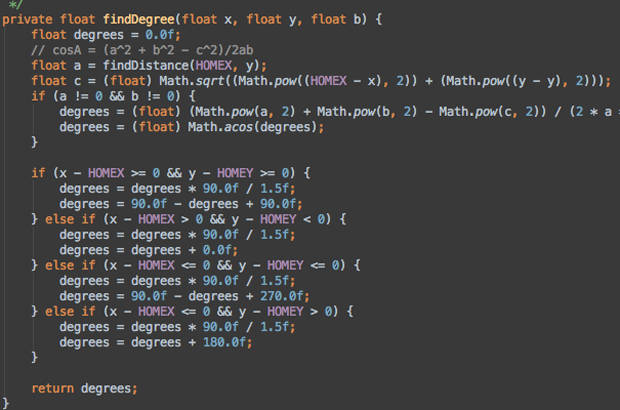
An Arduino powered rover with two operation modes. Autonomous mode uses an ultrasonic distance sensor for collision detection. Once a collision is imminent the rover will stop and look for an available direction, turns that way and continues on. The controller mode uses a bluetooth serial communication from an Android Application to drive.